
Plataforma cuadrúpeda orientada a formación y experimentación; integra LiDAR, cámaras y Jetson Orin para desarrollar, simular y validar algoritmos de robótica autónoma.

Laboratorio vivo
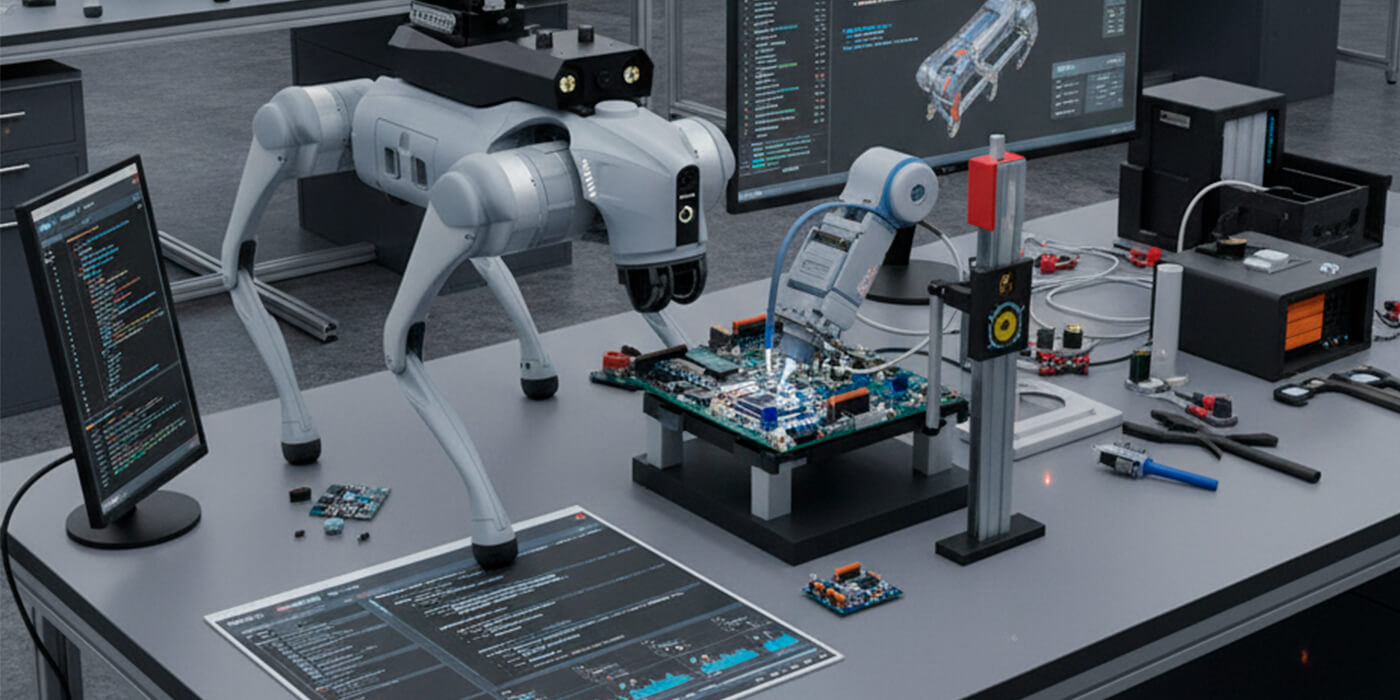
ROS y SDK oficiales, sensores 3D, cómputo Jetson y diseño modular brindan un entorno escalable para investigación y pruebas de autonomía y percepción.



 ROS completo
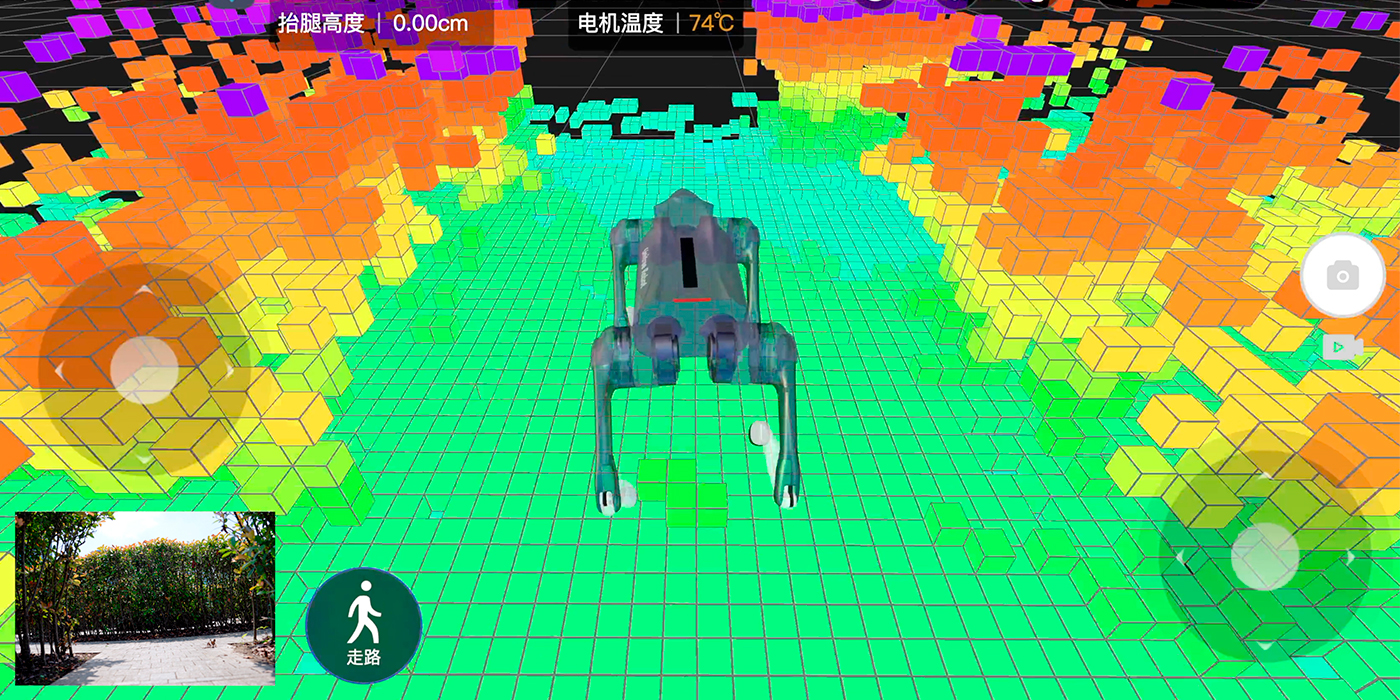
ROS completo LiDAR y cámaras
LiDAR y cámaras Potencia Jetson
Potencia Jetson Expansión modular
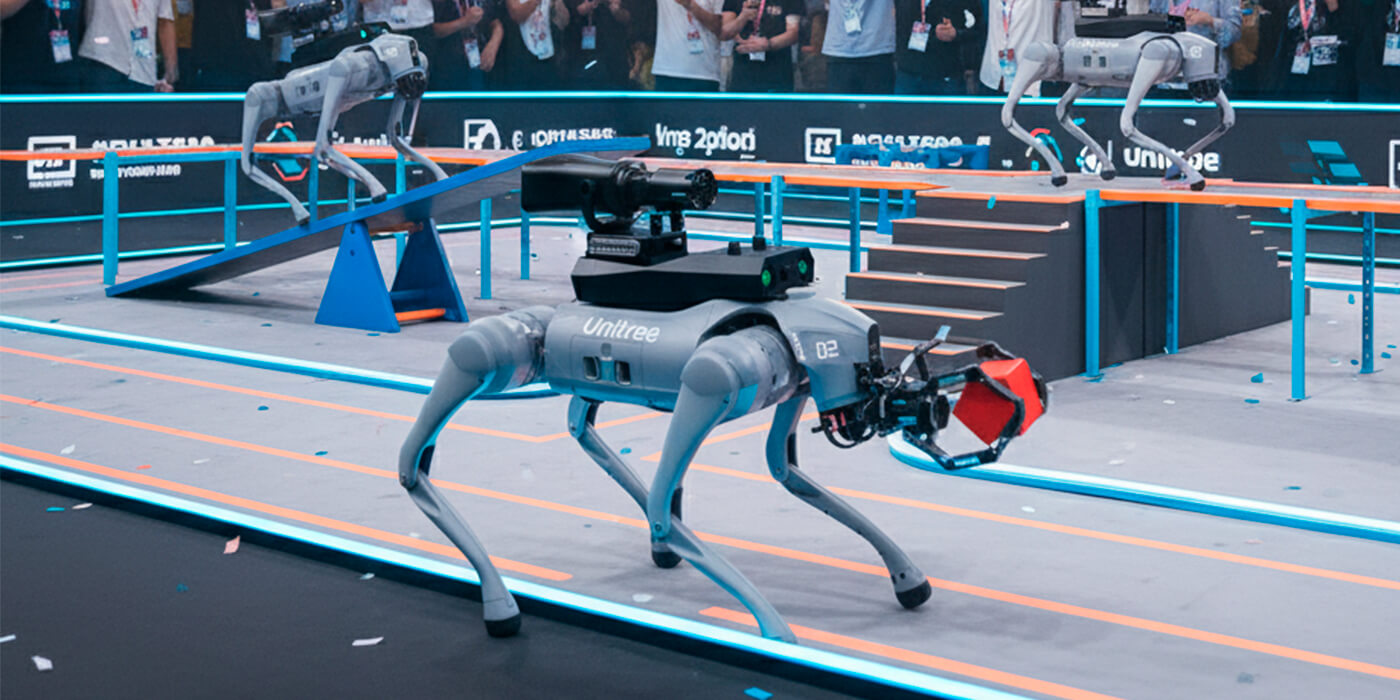
Expansión modular Pruebas de autonomía
Pruebas de autonomía Integración con sistemas
Integración con sistemas














 Optimized by Seraphinite Accelerator
Optimized by Seraphinite Accelerator