| Dimensions (Standing Position) | ≈ 700 mm × 310 mm × 400 mm (70 × 31 × 40 cm) |
| Dimensions (Prone Position) | ≈ 760 mm × 310 mm × 200 mm (76 × 31 × 20 cm) |
| Weight | ≈ 15 kg (including battery) |
| Battery Performance | Standard battery: ~8000 mAh
Optional battery: 15000 mAh (extended autonomy) |
| Operating Endurance | Approximately 2–4 hours (depending on battery and configuration) |
| Wheeled Foot | Available on Go2-W version |
| Payload Capacity (Standing) | ≈ 7–8 kg typical payload
Up to ~10–12 kg depending on version |
| Payload Capacity (Walking) | ≈ 7–8 kg payload (varies by configuration) |
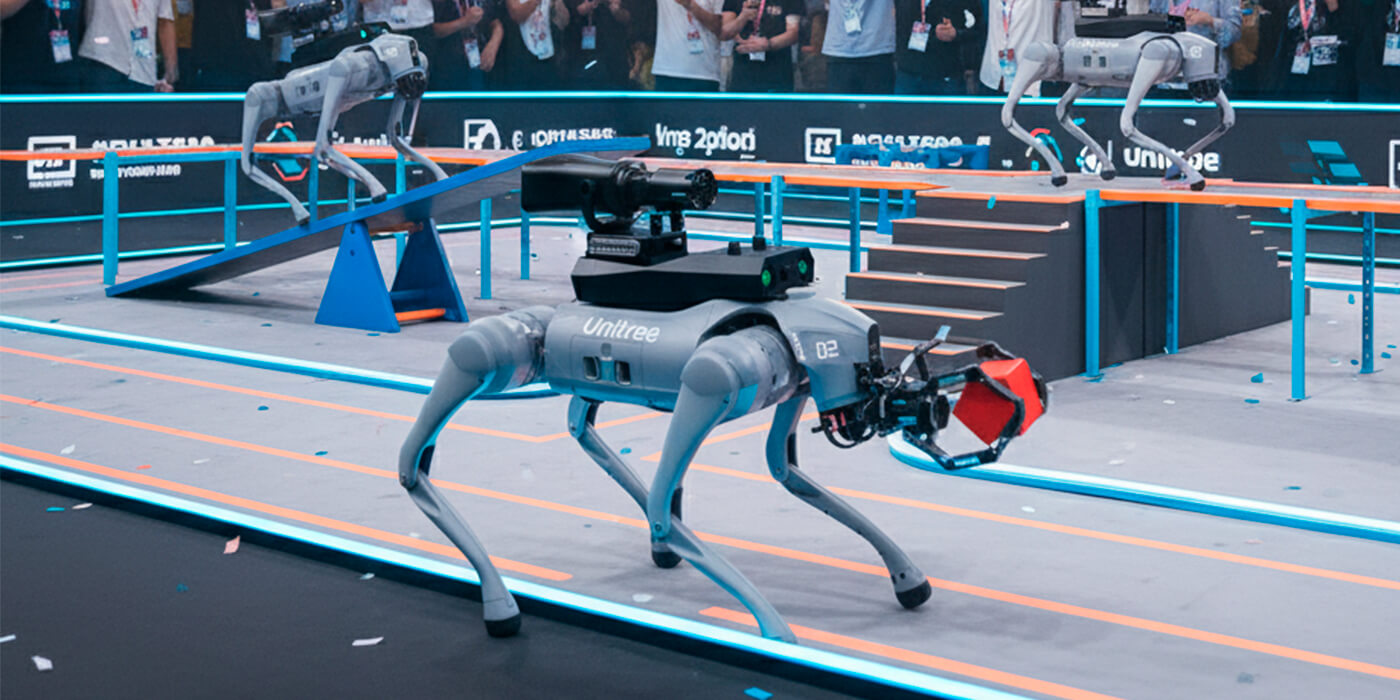
| Continuous Stair Climbing | Capable of climbing moderate obstacles (configurable) |
| Climbing Capability | Stable terrain and obstacle climbing supported by advanced sensors |
| Maximum Climbing Angle | Up to approximately 40° (reference value for similar models) |
| Running Speed | Up to ~2.5–3.7 m/s (depending on version and terrain) |
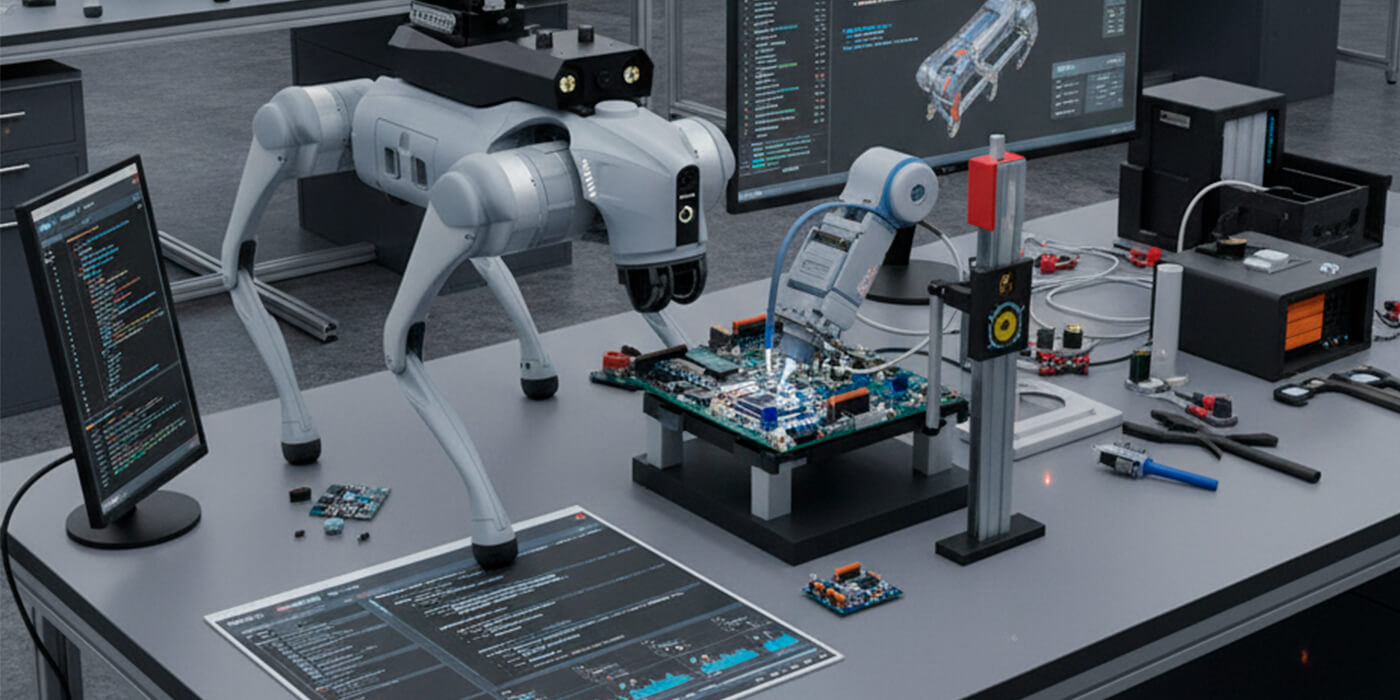
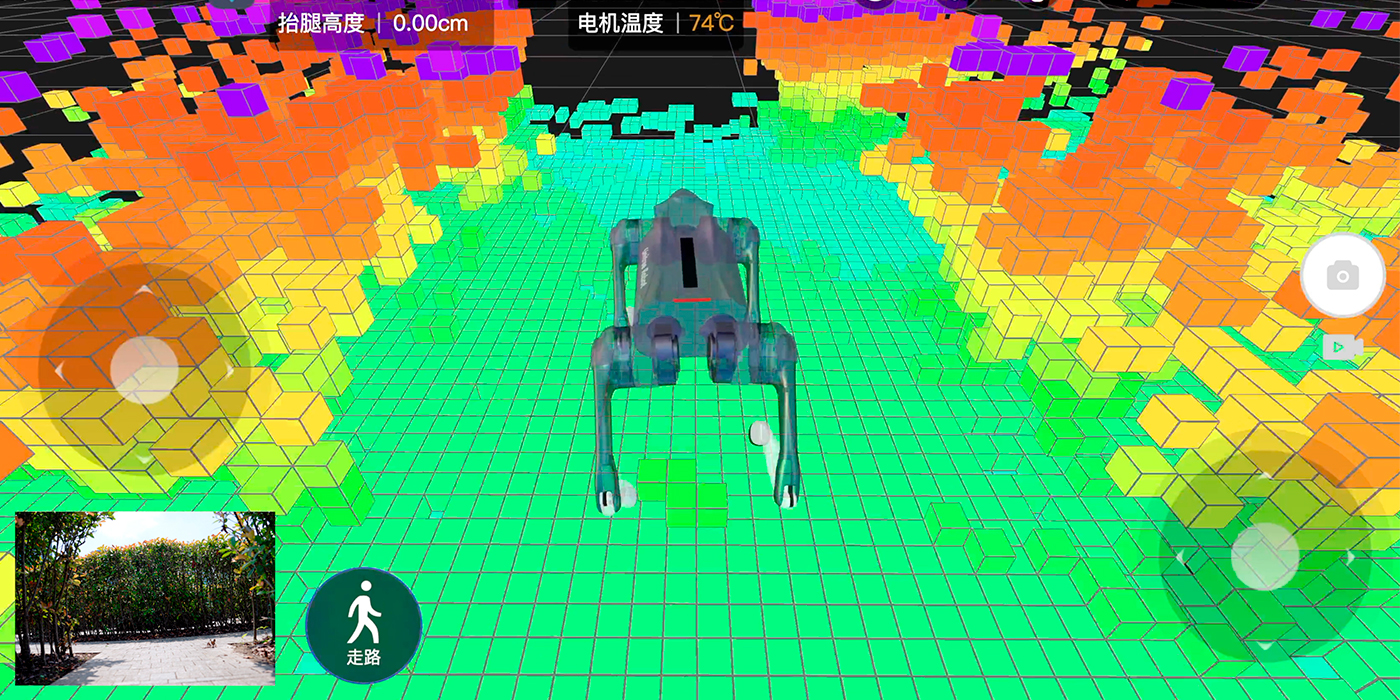
| Control & Perception | High-performance CPU (varies by version)
Integrated AI with 4D LiDAR and 360° × 90° perception |
| Perception Sensors | Ultra-wide-angle 4D LiDAR
Depth cameras
Advanced vision system |




 Full ROS support
Full ROS support LiDAR and cameras
LiDAR and cameras Jetson compute
Jetson compute Modular expansion
Modular expansion Autonomy testing
Autonomy testing System integration
System integration